RAVEN’s Bio-Inspired Jumping Mechanism Advances Robotic Mobility for Complex Environments
LAUSANNE, Switzerland (Dec. 4, 2024) – Monica Daley, director of the Center for Integrative Movement Sciences (CIMS) at UCI, has co-authored a groundbreaking study led by the Laboratory of Intelligent Systems at the École Polytechnique Fédérale de Lausanne (EPFL) on the development of RAVEN, a bio-inspired robot capable of achieving multi-modal terrestrial and aerial locomotion. This breakthrough brings robotics closer to achieving agility in complex terrains, with legs that enable it to walk, hop, jump over obstacles and launch rapidly into flight.
The study, titled “Fast ground-to-air transition with avian-inspired multifunctional legs,” underscores the power of interdisciplinary collaboration. Won Dong Shin and Hoang-Vu Phagn spearheaded the research with Dario Floreano, head of the Laboratory of Intelligent Systems, and Auke Ijspeert, director of the Biorobotics Laboratory at EPFL. Daley contributed expertise in avian biology, biomechanics of locomotion, and locomotor dynamics.
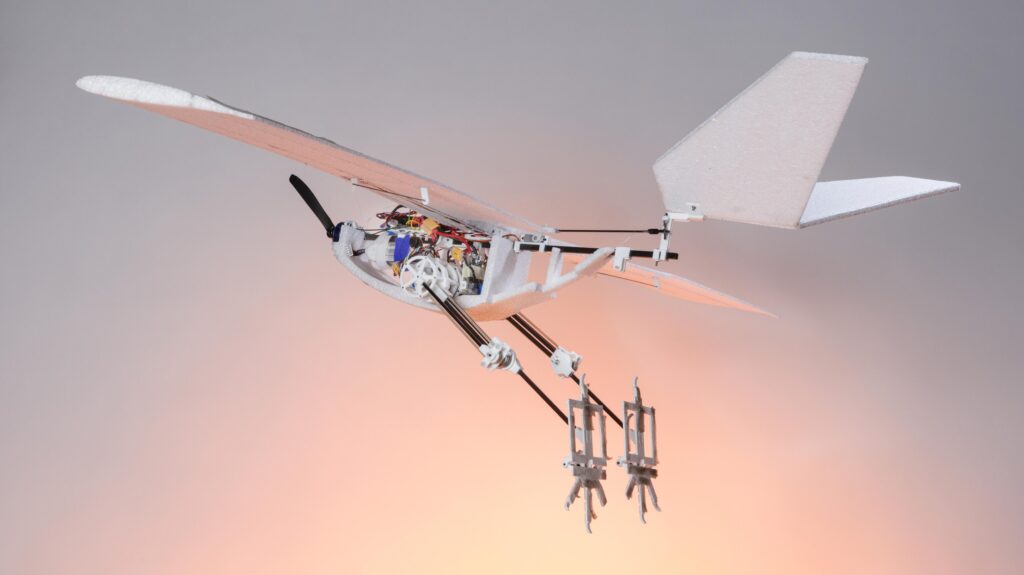
The paper takes inspiration from avian anatomical structure and locomotor function to design bird-inspired multifunctional robotic legs. Adding simplified bird-inspired legs to RAVEN, an uncrewed aerial vehicle (UAV), enables it to navigate complex environments and take off for flight efficiently and rapidly without a long runway or external launching mechanism.
Importantly, this collaborative research highlights the two-way interaction between biology and robotics. RAVEN draws inspiration from birds, demonstrating integrated locomotor function with dynamics and energetics comparable to real birds. The study reveals the benefits of combining legs with wings for versatile locomotion in complex terrains, despite the trade-off of added leg mass required by the multi-functional design. In natural systems, birds that frequently engage in ground-to-air transitions have a relatively higher investment in leg mass relative to total body mass. RAVEN opens new possibilities for UAV use in complex environments that are currently hazardous or inaccessible to traditional UAVs, such as rugged natural terrains, dense forests, or navigating rubble in disaster zones, where adaptable transitions among locomotor modalities may be critical.
Research Team and Affiliations:
Monica Daley – Director of the Center for Integrative Movement Sciences (CIMS) and UCI Neuromechanics Lab, University of California, Irvine, USA; Professor of Ecology and Evolutionary Biology, Dunlop School of Biological Sciences; with joint appointments in Biomedical Engineering and Mechanical and Aerospace Engineering, Samueli School of Engineering.
Won Dong Shin, Hoang-Vu Phan and Dario Floreano – Laboratory of Intelligent Systems, École Polytechnique Fédérale de Lausanne (EPFL), Lausanne, Switzerland.Auke J. Ijspeert – Director of the Biorobotics Laboratory, EPFL, Lausanne, Switzerland.
Auke J. Ijspeert – Director of the Biorobotics Laboratory, EPFL, Lausanne, Switzerland.
Read more in Nature “News and Views” here
Link to the full research article in Nature